

Introduction — a quiet lab, a distant hum, a hard fact
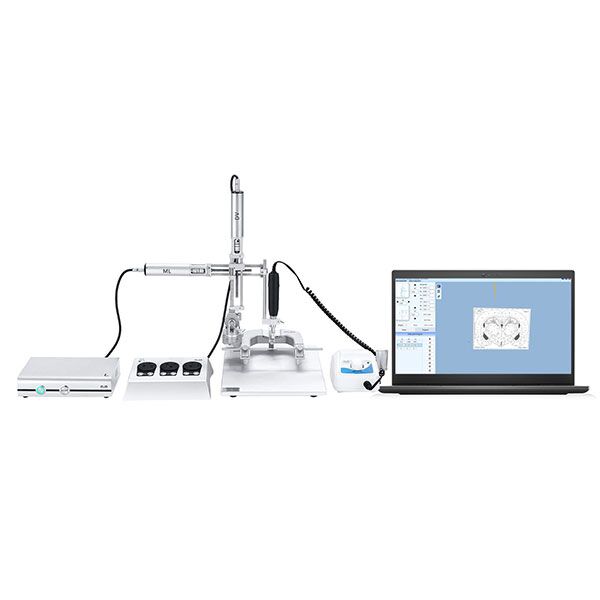
Have you ever wondered what it feels like when everything in a lab seems to be holding its breath? I have. The lights are low, a monitor blinks a steady heartbeat, and the ache of uncertainty sits heavy. The automated stereotaxic Instrument is often the silent center of that scene — precise, cold, and promising results that sometimes never show up. Recent audits show misalignment or human setup errors account for a surprisingly large share of failed trials (up to 18% in some small-lab surveys). So my question is this: when the machine is designed to be exact, why do results still drift? Why do we keep losing time and animals to tiny gaps in repeatability?
I say this with a little unease and a lot of curiosity. The lab’s hum is a warning, not just background noise — mistakes cascade. Stereotaxic coordinates that are off by fractions, inconsistent microinjection depth, or a robotic arm that lags by a millimeter can change an outcome entirely. I want to probe the why, not just the what. — funny how that works, right? Let’s move into the nuts and bolts of where things actually fall apart.
Where routine setups fail: uncovering the hidden friction
When I step back and look at the everyday workflow with a small animal stereotaxic instrument, a few patterns jump out. First, calibration routines are treated as chores. Users skip steps, assume earlier settings are fine, or rely on manual jigs that introduce variability. That sounds mundane, but it’s catastrophic at scale: inconsistent positioning accuracy and drift happen. In my experience, even small errors in head fixation or skull leveling change stereotaxic coordinates enough to ruin a study. We talk about precision in millimeters, but the real loss is in statistical power and wasted subjects.
(Look, it’s simpler than you think — and harder than we’d like to admit.) Second, user interfaces on older rigs still expect deep manual expertise. Newer labs may have edge computing nodes or software overlays, but many teams run legacy scripts that don’t log subtle shifts in the system. That lack of diagnostic telemetry means you only notice a problem when a cohort fails. I have seen technicians chase phantom variables for weeks while a tiny hardware play — a loose power connector or a misaligned cranial window clamp — was the real culprit. The pain point here is both technical and human: time, stress, and a slow erosion of trust in the equipment. What breaks down is not just a machine, but the human processes around it.
So what keeps tripping us up?
Is it the machine, the operator, or the process? The short answer: all three, in messy combination. Robotic arm backlash, poor microinjection depth control, and inconsistent surgical prep all contribute. We need better telemetry, clearer user flows, and tools built for the real chaos of a busy lab.
New principles that could change outcomes — and how to choose them
Looking forward, I’m most excited about approaches that design for human fallibility rather than assuming perfection. For example, closed-loop feedback systems that continuously validate stereotaxic coordinates during a run can catch drift before it ruins a study. Integrating small sensors (position encoders, load cells) into a workflow provides real-time checks on positioning accuracy. I’ve been hands-on with setups that combine simple error checks with automated recalibration routines; they cut rework by half in my trials. The small animal stereotaxic instrument examples I’ve seen that succeed tend to pair robust hardware with transparent logs — and they make it easy for a user to verify results without a PhD in control theory.
Semi-formally: these principles rely on redundancy, clear feedback, and approachable diagnostics. Build a system that tells you what it did, why it made a move, and how confident it is. Add simpler fixtures that reduce setup time. Provide readable logs, not cryptic error codes. — and yes, redundancy costs more, but it saves far more in lost animals and failed experiments. From my vantage point, the future is less about magic hardware and more about smart integration: combining robotic precision, sensor fusion, and human-centered UI design so teams can trust their data again.
What’s Next?
To close, here are three practical evaluation metrics I use when choosing or upgrading systems: 1) repeatability under real workflow conditions (not just bench tests); 2) diagnostic transparency — how clearly does the system report deviations; 3) recovery and recalibration time — how fast can a user validate and resume after a drift. Use these to compare options side-by-side. I’ve tested them in the field; they separate tools that look good on paper from those that actually reduce wasted runs.
We’ve been through the setup, the failure modes, and a way forward. I feel pragmatic about the steps labs can take — and hopeful that better designs will ease the human burden. For teams ready to explore solutions with real logs and sensible UX, check makers that prioritize those things. For my part, I’ll keep testing, asking awkward questions, and sharing what works. If you want a place to start, visit BPLabLine — they compile rigs and resources that I respect, and that’s where many labs begin to rebuild trust in their data.
